���ڲ�늿�����·�в����о� ժ Ҫ���S�����ϵ�y�İlչ��һЩ����Y����ݔ늾�·�玧��늿�����·��������V�������в���ӱ��o�������@Щ���⾀·�r�����RһЩ�µĆ��}����ˣ�Փ�Ļ����@�N���⾀·��ģ���о��ƌ�������ʴ_���в��������xʽ��ͬ�r�Y������Č��÷��������g�����F���в���ӱ��o���@�N���⾀·�еđ��á�
�����P�I�~����늿������в�����ӱ��o
����
������ ��
�����S�����ϵ�y�İlչ��늾WҎģ�ĔU�����ƾ�·�^늉�����߾�·ݔ������������ϵ�y�����Ի�ʡͶ�Y�ȣ�һЩ�����ؓ�Y����ݔ늾�·�玧��늿�����·��T�Ӿ�·�������a��·��ͬ�U�����p�ؾ�·���ڇ����ⳬ(��)�߉����ϵ�y�Б����������ࡣ�в���ӱ��o�����܉����Փ��������������Ӱ푣�����ڳ�(��)�߉�ݔ��L�����o�о��кܴ�ă��ݡ������в���ӱ��o���������������ݔ늾�·�r�����RһЩ�µĆ��}�������@Щ�b�û�T���c�l���в��ķ�������䣬���·�g����������ϵȣ�����m������ͨ�p�˾�·�ķ����ڴ˲���ֱ�ӑ��ã�����б�Ҫ����չ�_������о���̽���m�����@Щ���⾀·���в���ӱ��o����������ᘌ��в���ӱ��o�ڎ���늿�����·���Õr���ڵĆ��}��������ģ�ͽY�����о��ƌ��o���˺���ʴ_���в��������_ʽ�����F���в���ӱ��o���@�N���⾀·�еđ��á�
����
����һ���в��Ļ�������
�����Dʾ����ֲ�������·MN���O��λ�L������R��늸О�L��늌���G����ݞ�C�����ՈDʾ��늉�������������ɵþ���ֲ�������·늉�����Pϵ��ƫ�ַ������£��в���ӱ��o�����ڎ���늿�����·�r��ͬ�ӕ��ܵ���·ģ���`���ֵӋ���`����ٲ�һ���Ե����ص�Ӱ푣������\�л�^����ϕrҲ���a��һ���IJ�ƽ���������ͨ�^��߄�������T������ֹ���o�`�ӣ��ݱؕ�Ӱ푅^�ȸ�����ϕr���`���ȡ�
����
������ˌ��ڎ���늿�����·��ʽ�в��Ƅ�������x���c���y�������ӱ��o��ȣ��в���ӱ��oֻ���ڲ����γ��������^�e�����y�����ӱ��o�����P���ü��g��ȫ���ԑ������в���ӱ��o�С��Ă��y�����ӱ��o�������a����ʩ�ĽǶȳ��l���в���ӱ��oͨ�^�����ݔ�r�g�ӡ����迹ZC�Լ��ɶ˵�늉���������ȫ�a����·����������Փ�ϲ��ؿ��]����������IJ�ƽ����������Idz���@�����͡����ڌ��H����ݔ늾�·��ͬ�ӿɲ���ģ׃�Q������õ�������в��������Ƅ�����Ķ����ɷ����ӱ��o�����F�x�����l��
����
��������늿�����·���в���ӱ��o
������/���߉�ݔ��L���О����ո߉�늾W�^ʣ�ğo�����ʣ���ֹ�^늉���ͬ�r����·�M�Ѕ����a����ͨ����Ҫ�b�O��늿�������늿��������b�O�ھ�·�ɂȣ�Ҳ�����b�O�ھ�·���g���ھ�·�ɂȺ����c���b�O���в���ݔ����늿����r�����l����������䣬ʽ(5)���Г������a����ƽ�������̧�߄����T��ֵ��Ӱ��в���ӱ��o���`���ȣ���˱��Ҫ��ȡ��ʩ������늿�����Ӱ푡�
����
�����D�У��O,,MNKuuu�龀·M�ȡ�N�Ⱥ����c��늉�����·���������������D2��ʾ��MNKLLL�քe��ɂȼ����c��늿�����늸С��ȿ��]��·���g�]�в�늿�������r�������O�D2�е�KL���ޣ��˕r��·M��-N���Ԟ���ͨ��·���ʿɵ��в��������в���ӱ��o�ǻ��ڟo�p��·�ģ����H��·��������������������\�л�^����ϕr������һ���IJ�ƽ����������⣬���ڎ���늿�����·������ʽ(15)~(17)���ò�ִ����֣����ڔ�ֵӋ���`�Ҳ���a����ƽ���������ͨ�^��߲�ӱ��o����С�������dzI����ֹ���o�`�ӣ��ݱؕ�Ӱ푅^�ȸ�����ϕr���`���ȡ���ˣ����Ղ��y�����ӱ��o�ķ��������T��ֵdzI�Ļ��A����������в��Ƅ�����
����
���������������
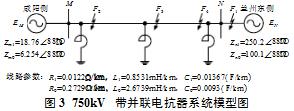
������������EMTP늴ŕ��B��������D3��ʾ����늾W�m�ݖ|−���750kVԇ·�M�з���Ӌ�㡣��·ȫ�L497km����ꖂȺ��m�ݖ|�ȸ��b��1�_3��90Mvar��1�_3��100Mvar�IJ�늿�������·���c�b�O2�_3��100 Mvar�IJ�늿��������wϵ�y�;�·����Ҋ�D3���Ʌ���Ӌ��ò��迹��CZ=250Ω��0CZ=550Ω����·M-N�ϵ��в���ݔ�r�g���=1.7ms, 0��=2.5ms��M�Ȟ鱾�ȣ�N�Ȟ錦�ȡ�����Ŀǰ2M���ʹ��wͨ���ѽ��ձ鑪�ã����늉�ÿ�ܲ��ɘ�24�c�����Ȃ��͵Ĕ����M�в�ֵ̎�������{�á�
����
�����ڳ�Ҏ�����ӱ��o�У���·�ճ�r��ƽ����������˿��ȿ��쾀·�ճ�r�в���ӱ��o�����ԡ����D3�е�N���������_��M�Ⱥ��l�����õ��в�������D4��ʾ(�D��ֻ�������^���ص��Ⱥ���a�ನ�Σ����ýYՓ�m������������)�����@Щ�����п��Կ������mȻ�ھ�·�ճ�(��^�����)�r����Փ�ϲ����a���в������������ڔ�ֵӋ��;�·����ģ��(���Ծ�·���)�`���ԭ���H���Õr���ڲ�ƽ���в�������˲�rֵ�в������еĕ��B��ƽ�������ֵ�_��2.13kA���h�h���ڷ��B��ƽ����������Ҫ�ɸߴ��C���M�ɣ��f�������`��ߴ��C�����^���С���ȡ�벨���ϻ�ȫ�������㷨���в�������齵��(�������ȫ�������㷨������ֵ��0.16kA��ֻ��˲�rֵ�в���7.5%)�������ڌ��H�����в�ȡ�m���ĞV����ʩ�DZ�Ҫ�ģ������@�������в���ӱ��o�Ą����T����
�����mȻȫ�������㷨�Ĕ������L�ȱȰ벨�����㷨��1����������в�����ֻ�а벨�����㷨��0.45(0.16/0.356)����ӱ��o�څ^�ȹ��ϕr���صȵ��㷨�������M���Ͷ�룬���ڲ�ȡȫ�������㷨���o�Ą����T���Ȱ벨�����㷨����1�����^�ȹ��ϕr������Ӱ푄����ٶȣ��ʱ��IJ���ȫ�������㷨���@Ȼ���ڲ���ȫ�������㷨���в���ӱ��o���b�òɘ��ʵ�Ҫ���ȳ�Ҏ��ӱ��o�ߣ���ȫ�����ڬF�м��g�l�����F��
����
�����ĈD4(d)�ɿ�������·�ճ���в������c�Ƅ������ֵm��С�����ֵֻ��0.033��������ʽ(22)�ı����Ƅ����ԣ������Ƅ�ϵ��k����ȡ�úܵͣ�����Ӱ푅^�ȹ��ϕr���`���ȡ�혱�ָ�������ڳ�Ҏ��ӱ��o���ھ�·�ճ�rֻ��һ��������������Ƅ����Բ��ܰl�]���ã������в���ӱ��o����������늉��������ھ�·�ճ�r�Ծ��к����Ƅ����á� �D5��^��F1̎�l��AG�����Թ��ϕr(��ȫ�������㷨��)�в�������mֵ����������ǰ�в�������С���s0.012kA����ֵm��0.004�����Ϻ�ĕ��B�^���У��в����������ֵ�s0.144kA��m���ֵ�s��0.023�����B�^�̽Y�����B���в������ͱ�ֵm�քe�s��0.065kA�� 0.009��
����
�������ՈD4���Կ����������\�Еr�в������ͱ�ֵm����С������·�ճ�r�в������ͱ�ֵm������څ^��������Ҳ�M�еķ���Ӌ�㣬�C������ĽYՓ��Ȼ��������ˣ�����ʽ(22)�ľ��б����Ƅ����Ե��в���ӱ��o�Г�����С��������Idz�������^�����\�еIJ�ƽ���������������Ч�ؽ��̈́����T������߱��o���`���ȣ������Ƅ�ϵ��k�t��ԓ���ն��^��·�ճ�r�����mֵ���������]һ����ԣ�ȣ����hȡk=0.1~0.15��
����
�����D6�龀·F4�c�l��a��400Ω�ӵع��ϕr(��ȫ�������㷨)���в�������mֵ����������ǰ���в������ͱ�ֵmֵ�c�D5��ͬ�����Ϻ��в������ͱ�ֵm�ķ��Bֵ�քe�s��1.83kA��0.613���ɈD6֪�����Ϻ��в������ͱ�ֵm�����ܿ죬�Ҏ��dž��{�����ġ����Ϻ�2ms�����_������ǰ����17�����˕r������mֵ��0.12���ɴ˿�Ҋ����ʹ������ȫ�������@�ӵ��L���㷨���в���ӱ��o�ڸ�����ϕr�Ծ��зdz���Ą����ٶȡ�
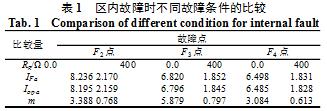
��1�г��˾�·�^��AG���ϕr��ͬ�����c����ͬ�^�����l���¹����c������в�������mֵ�ı��^����Ҋ�в�����opaI⋅�c�����c���FaI�dz��ӽ������Г����в�����ֵ�ܕr�r��ӳ�����c���ֵ�����⣬��ĩ�˸���ӵع��ϕr���в������c�Ƅ����֮��mȡ����Сֵminm=0.613���h���څ^����ϡ���·�ճ�r��mֵ��
����
�ġ��YՓ
����ᘌ�����늿�������/���߉�ݔ��L�������Ľo����һ�N�µ��в��������_ʽ�������������һ�N�����p�����Ƅ����Ե��в���ӱ��o���÷�������Փ�ͷ���Ӌ�������
������1�����ñ��Ķ��x���в��������_ʽ��·�����r�IJ�ƽ��������ֵ��齵�͡�
������2���^����ϡ���·�ճ�r���^��ĕ��B��ƽ����������þ��б����Ƅ����Ե��в���ӱ��o�ܽ��̈́����T��ֵ����߱��o���`���ȡ�
������3���^�ȹ��ϕr���в�������mֵѸ��������m������������kֵ�����o�ܿ��ل�����
������4��ԓ�������b�òɘ��ʺ�ͨӍ���ʛ]���^�ߵ�Ҫ���܉��ڬF�м��g�l�����F�������^�ߵČ��Ãrֵ��
��(��)�߉�ݔ��L���О����ո߉�늾W�^ʣ�ğo�����ʣ���ֹ�^늉���ͬ�r����·�M�Ѕ����a����ͨ����Ҫ�b�O��늿�������늿��������b�O�ھ�·�ɂȣ�Ҳ�����b�O�ھ�·���g����·�ɂȺ����c���b�O���в���ݔ����늿����r�����l����������䣬��ʹ��·�Ȳ��o���ϕr���ɂȷ������в��IJ�ֵҲ���a����ƽ����������̧�߄����T��ֵ��Ӱ��в���ӱ��o���`���ȣ�����б�Ҫ��ȡ��ʩ������늿�����Ӱ푡� |
